Zdefiniowanie pracy steru tylnego jest dość trudnym zadaniem, ponieważ kiedy znajduje się on w położeniu równoległym do kierunku wiatru, nie działa na niego żadna siła boczna. Aby ster zaczął „działać” musi dojść do pewnego jego wychylenia z położenia równoległego do kierunku wiatru. Na
rys 1 przedstawiono taką sytuację, kiedy kąt odchylenia osi wirnika od kierunku wiatru
Θ jest niezerowy. Tak zdefiniowany kąt
Θ jest zatem różnicą
(1):
 |
(1) |
gdzie: |
Θz - położenie osi wirnika wyrażone w radianach,
Θwiatr - kierunek wiania wiatru. |
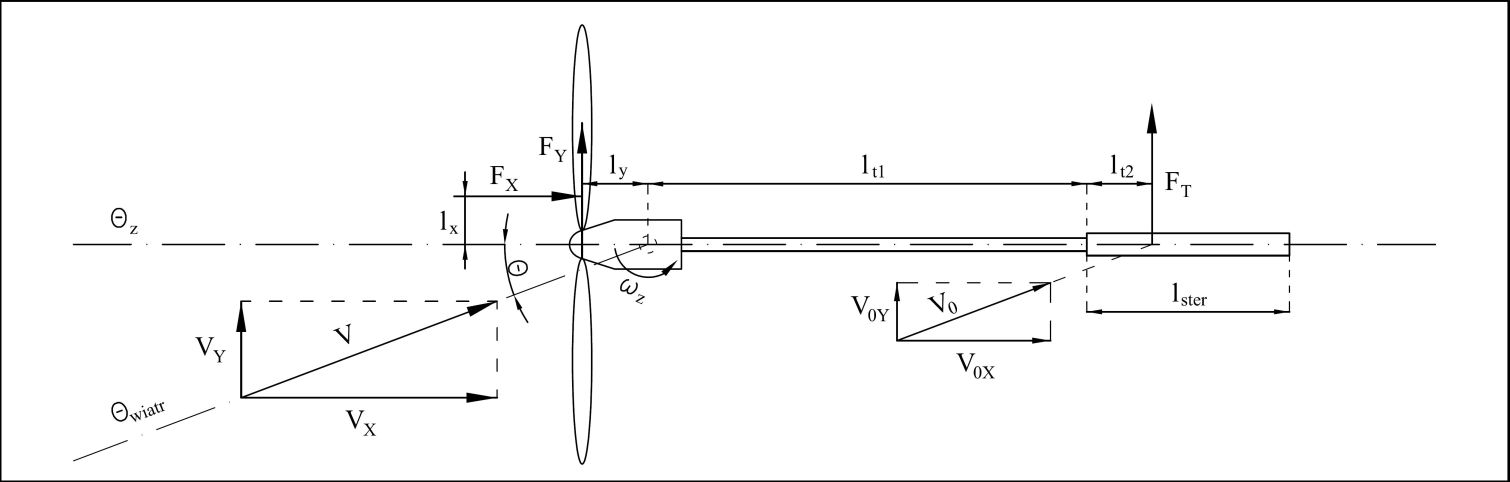
Z rys 1 wynika, że sile bocznej FT, próbującej ustawić elektrownie wiatrową w położeniu równoległym do kierunku wiatru, przeciwdziała siła parcia wiatru na koło wiatrowe. W skład tej siły wchodzi siła FX prostopadła do płaszczyzny koła wiatrowego (zaczepiona w środku parcia) oraz siła FY leżąca w płaszczyźnie koła wiatrowego. Wystąpienie tych sił jest zdeterminowane przez składowe prędkości wiatru. Jedna składowa VX prostopadła do płaszczyzny koła daje osiową siłę parcia FX. Druga składowa VY równoległa do płaszczyzny koła działa na powierzchnię jego rzutu poprzecznego co daje siłę FY.
Rys. 1. Siły aerodynamiczne, występujące na kole wiatrowym odchylonym od kierunku wiatru (Θ - kąt odchylenia osi wirnika od kierunku wiatru, Θz - położenie osi wirnika, Θwiatr- kierunek wiania wiatru, FT - siła boczna wywierana przez wiatr na ster tylni, FX, FY - składowe siły parcia wiatru na koło wiatrowe, V - prędkość wiatru, VX i VY - składowe prędkości wiatru, V0 - prędkość wiatru za kołem wiatrowym,V0X i V0X - składowe prędkości wiatru za kołem wiatrowym z - prędkość kątowa elektrowni względem osi pionowej Z, lt1 i lt2 - ramie siły FT, lster - długość płata steru tylnego, lx - ramie siły FX , ly - ramie siły FY).
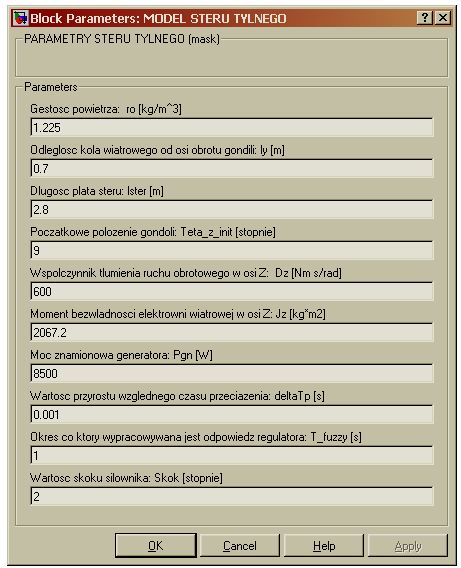
Całą dynamikę steru tylnego, zawarto w podsystemie ”MODEL STERU TYLNEGO ZE STEROWANIEM”. Jednocześnie utworzono maskę podsystemu wraz z oknem dialogowym (rys. 2), co daje możliwość korekty czy też zmiany parametrów symulacji (bez konieczności wchodzenia do „wnętrza” programu), które wyróżniono poniżej:
- gęstość powietrza,
- odległość koła wiatrowego od osi obrotu gondoli,
- długość płata steru,
- początkowe położenie gondoli,
- współczynnik tłumienia ruchu obrotowego w osi Z,
- moment bezwładności elektrowni wiatrowej w osi Z,
- moc znamionowa generatora,
- wartość przyrostu względnego czasu przeciążenia,
- okres, co który opracowywana jest odpowiedź regulatora,
- wartość skoku siłownika.