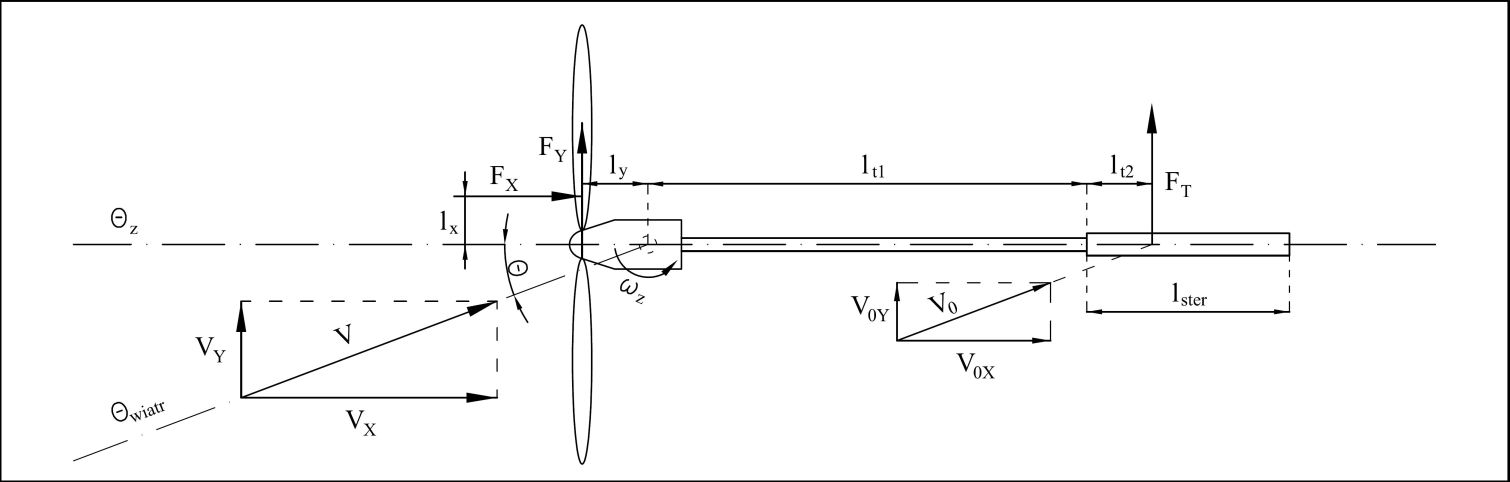
W przypadku kiedy koło wiatrowe ustawione jest dokładnie w pozycji prostopadłej do kierunku wiania wiatru, to środek parcia wiatru na silnik wiatrowy znajduje się w środku tego koła. Natomiast siła parcia dla takiego położenia turbiny wiatrowej, zawiera tylko jedną składową, prostopadłą do płaszczyzny koła (siła
FX). Jednak w momencie kiedy dojdzie do pewnego odchylenia płaszczyzny wirnika od położenia prostopadłego do wiatru, środek parcia przesunie się w bok o pewien odcinek
lx. W takim przypadku siła parcia w zawiera dwie składowe
rys. 1:
- składowa FX (siła parcia osiowego) prostopadła do płaszczyzny koła wiatrowego i zaczepiona w środku parcia wiatru (związana ze składową prędkości VX),
- składowa FZ (siła boczna) leżąca w płaszczyźnie koła wiatrowego (związana ze składową prędkości VZ).
Rys. 1. Siły aerodynamiczne, występujące na kole wiatrowym odchylonym od kierunku wiatru (Θ - kąt odchylenia osi wirnika od kierunku wiatru, Θz - położenie osi wirnika, Θwiatr- kierunek wiania wiatru, FT - siła boczna wywierana przez wiatr na ster tylni, FX, FY - składowe siły parcia wiatru na koło wiatrowe, V - prędkość wiatru, VX i VY - składowe prędkości wiatru, V0 - prędkość wiatru za kołem wiatrowym,V0X i V0X - składowe prędkości wiatru za kołem wiatrowym z - prędkość kątowa elektrowni względem osi pionowej Z, lt1 i lt2 - ramie siły FT, lster - długość płata steru tylnego, lx - ramie siły FX , ly - ramie siły FY).
Ze względu na złożoność występujących tu zjawisk rachunkowe określenie wartości składowych sił parcia jest bardzo skomplikowane. Dlatego też zazwyczaj wyznacza się je empirycznie w tunelach aerodynamicznych, a następnie przedstawia się na wykresach w postaci krzywych. Na ogół wykresy te nie przedstawiają wielkości sił, a jedynie wartość współczynników aerodynamicznych Cx oraz Cz.. Dla tak zdefiniowanych współczynników aerodynamicznych wartość składowych sił parcia wyniesie (1), (2):
 |
(1) |
 |
(2) |
Charakterystyki współczynników aerodynamicznych Cx oraz Cz w funkcji kąta natarcia wiatru na koło wiatrowe są zazwyczaj pilnie strzeżoną tajemnicą firm produkujących siłownie wiatrowe. Z tej przyczyny podczas przeszukiwania zasobów dostępnej literatury oraz Internetu nie znaleziono charakterystyk, które dokładnie odpowiadałyby modelowanej elektrowni wiatrowej. Niemiej jednak w publikacji [3] umieszczono wykresy współczynników aerodynamicznych dla silnika wiatrowego, które sporządzone zostały dla turbiny wiatrowej składającej się z czterech płatów (modeluje się elektrownię wiatrową o trzech płatach). Z braku innego zadowalającego rozwiązania postanowiono wykorzystać te krzywe zmienności współczynników aerodynamicznych. W związku z tym należy pamiętać, że otrzymane wyniki z symulacji modelu nie będą dokładnie odzwierciedlać rzeczywistości. Wypada jednak zaznaczyć, że charakterystyki te kształtem są bardzo zbliżone do silników wiatrowych o trzech płatach, tak więc dynamika nadążania elektrowni wiatrowej za kierunkiem wiania wiatru powinna być zachowana.
Przebieg zmienności funkcji współczynników aerodynamicznych Cx oraz Cz w zależności od kąta natarcia Θ przypomina kształtem przebieg funkcji wielomianowej (rys 2). Ta właściwość pozwala aproksymować charakterystyki wykorzystując do tego celu tylko dwa wielomiany (po jednym dla każdego przebiegu). Podobnie jak w przypadku zmiennej położenia środka parcia xpT do aproksymacji posłużono się matlabowską komendą polifit(). Cały skrypt umieszczono w zakładce Initialization w masce podsystemu ”MODEL STERU TYLNEGO ZE STEROWANIEM”. Rząd aproksymującego wielomianu dobrano tak, aby błąd aproksymacji nie przekroczył wartości +/-0.5% wartości rzeczywistej.
Rys. 2. Wynik aproksymacji charakterystyk współczynników aerodynamicznych Cx oraz Cy w funkcji kąta natarcia wiatru Θ (dla silnika wiatrowego z czteropłatowego), z zaznaczeniem punktów użytych do aproksymacji.
Z rys. 2 wynika że aerodynamiczny współczynnik osiowego parcia wiatru na koło wiatrowe Cx największą wartość osiąga przy prostopadłym ustawieniu koła wiatrowego względem kierunku wiania wiatru. Natomiast przy coraz większym odchyleniu turbiny wiatrowej od tego położenia współczynnik ten maleje. Z kolei przebieg współczynnika siły bocznej Cz jest zupełnie inny. Przy coraz większym odchyleniu silnika wiatrowego od wiatru, współczynnik ten rośnie, aż do osiągnięcia wartości maksymalnej, a później ponownie maleje. Należy zaznaczyć, że przebieg tej charakterystyki jest przesunięty w prawo o wartość kąta 0.17 rad.
Rachunkowe określenie wielkości sił FX oraz FZ pozwala obliczyć wartość momentu obrotowego wywołanego siłą parcia wiatru na koło wiatrowe. Moment ten będzie równy sumie momentów wywoływanych składowymi siły parcia. W przypadku składowej FY wyznaczenie wartości tego momentu jest prostym zadaniem, ponieważ ramie siły FY nie zmienia się i jest równe odcinkowi ly łączącemu środek koła wiatrowego z osią obrotu gondoli (rys. 1). Tak zdefiniowany moment obrotowy wyniesie (3):
 |
(3) |
Z kolei długość ramienia siły FY nie jest stała, lecz zmienia się wraz ze zmianą środka parcia wiatru na koło wiatrowe. Tym samym wielkość bocznego przesunięcia środka parcia (ramie siły) wyniesie (4):
 |
(4) |
gdzie: |
xpx – współczynnik przesunięcia środka parcia wiatru na koło wiatrowe. |
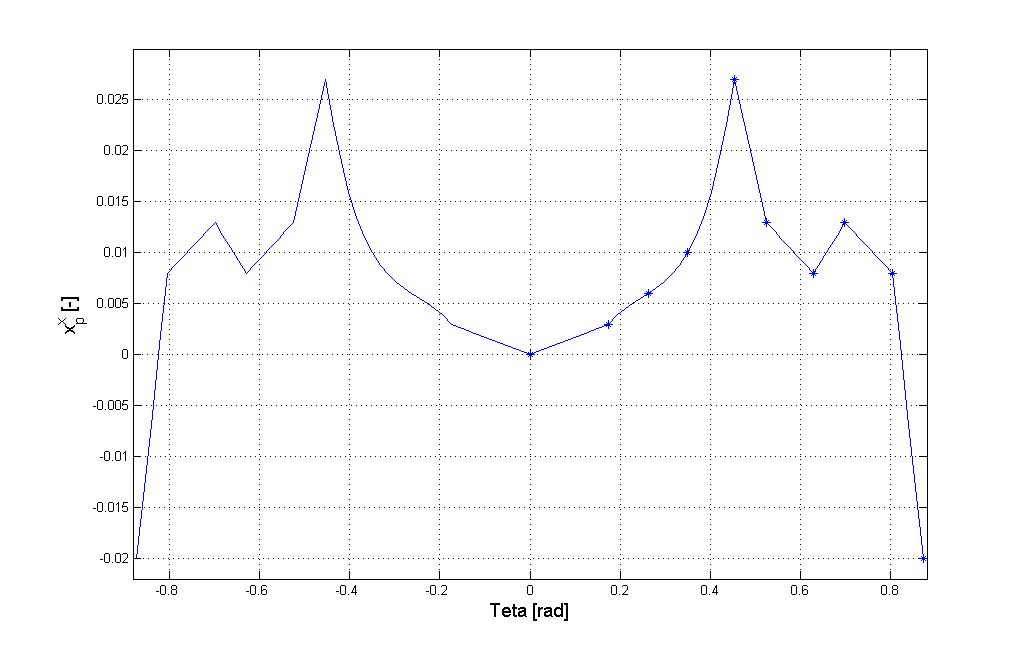
Podobnie jak w przypadku charakterystyk współczynników aerodynamicznych Cx oraz Cy nie udało się znaleźć przebiegu krzywych zmienności środka parcia wiatru na koło wiatrowe xpx wykonanych dla elektrowni wiatrowych posiadających trzy płaty. Wobec tego posłużono się charakterystyką zamieszczoną w publikacji [3], którą sporządzono dla turbin o czterech płatach. Wykres ten posiada wierzchołki, w których kąt nachylenia krzywych względem osi odciętych gwałtownie się zmienia. Natomiast pomiędzy tymi wierzchołkami wartość współczynnika środka parcia zmienia się zgodnie z funkcją liniowa. W związku z tym zdecydowano się dokonać oddzielnie interpolacji wielomianem pierwszego rzędu odcinków charakterystyki, które znajdują się pomiędzy tymi wierzchołkami. Natomiast resztę charakterystyki aproksymowano wielomianem wyższego rzędu. Funkcja xpx = ƒ(Θ) jest również funkcją parzystą, więc wystarczyło aproksymować ją tylko dla dodatnich argumentów kąta Θ. Podobnie jak w innych przypadkach do tego celu wykorzystano funkcję polifit(). Cały skrypt umieszczono w masce podsystemu ”MODEL STERU TYLNEGO ZE STEROWANIEM”. Na rys. 3 przedstawiono wynik dokonanej aproksymacji oraz interpolacji z zaznaczeniem punktów użytych do tego celu. Jak widać w przypadku odcinków, w których dokonano interpolacji funkcja przechodzi dokładnie przez wierzchołki charakterystyki przez tzw. węzły interpolacyjne. Natomiast w przypadku odcinka, w którym dokonano aproksymacji wykresu można zauważyć niewielki błąd aproksymacji, który nie przekracza wartości +/-0.5% wartości rzeczywistej.
Rys. 3. Wynik aproksymacji charakterystyki współczynnika przesunięcia środka parcia xpx (dla silnika wiatrowego czteropłatowego), z zaznaczeniem punktów użytych do aproksymacji.
Po zdefiniowaniu długości ramienia składowej siły parcia FX możemy określić, ile wyniesie moment obrotowy pochodzący od tej składowej siły (5):
 |
(5) |