Model dynamiki steru tylnego - równanie opisujące ruch elektrowni wiatrowej względem osi Z
W poprzednich dwóch podrozdziałach wyznaczono siły, które wywołują obrót elektrowni wiatrowej względem osi Z. Jednocześnie określono wielkość momentów obrotowych pochodzących od tych sił. Taki opis pozwala na sformułowanie dwóch równań różniczkowych przedstawiających dynamikę ruchu obrotowego elektrowni wiatrowej względem osi obrotu Z. Równania te przyjmują postać
(1),
(2):
 |
(1) |
gdzie: |
ωz - prędkość obrotowa gondoli. |
 |
(2) |
gdzie: |
Iz – moment bezwładności gondoli względem pionowej osi obrotu Z,
Dz - współczynnik tłumienia ruchu obrotowego turbiny wiatrowej względem osi Z. |
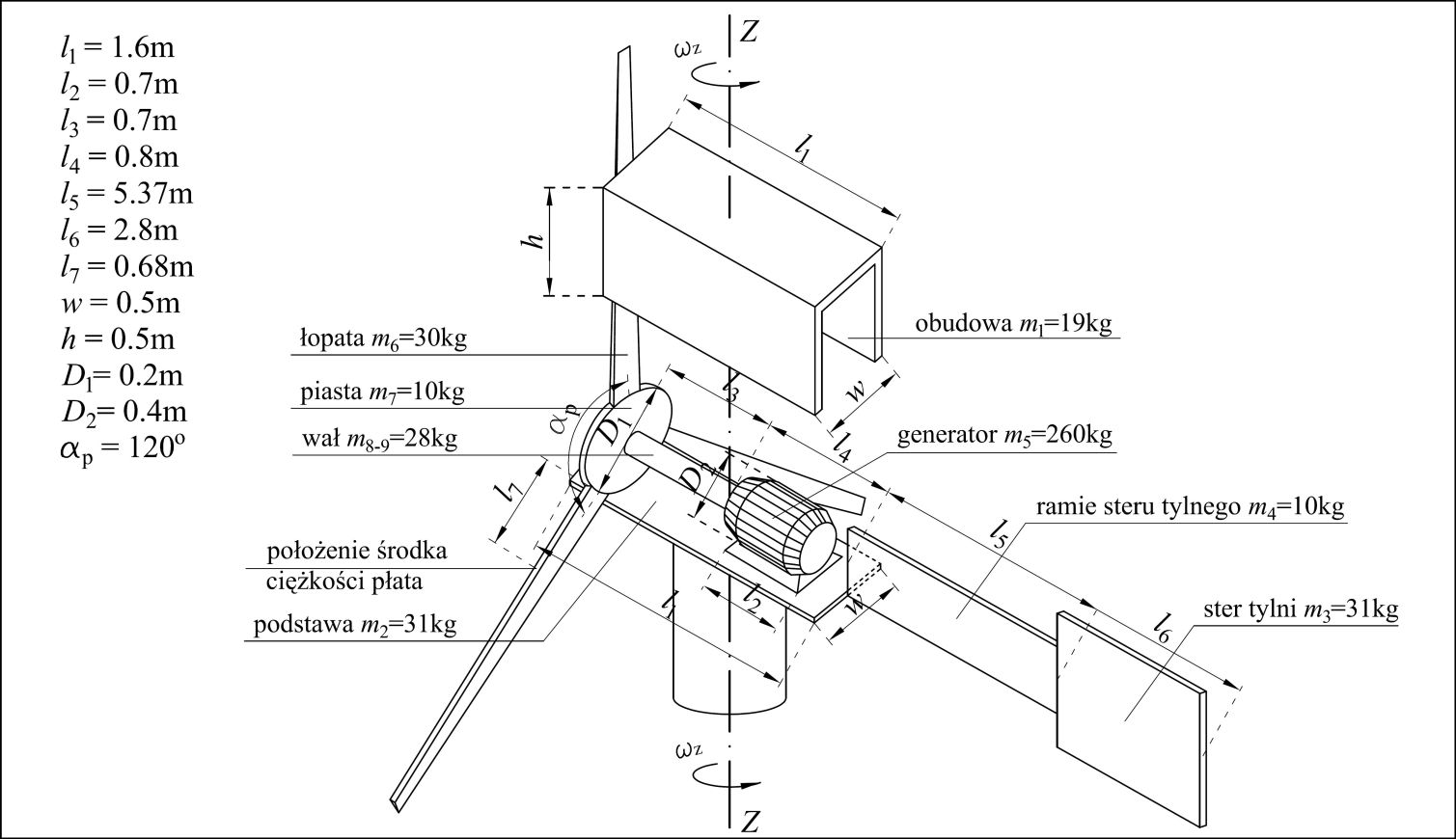
Przy stosowaniu powyższych zależności do modelowania ruchu nadążania elektrowni wiatrowej za zmianą kierunku wiania wiatru, należy wyznaczyć moment bezwładności elektrowni wiatrowej względem osi Z. W tym celu posłużono się podstawowymi wzorami, które można znaleźć m.in. pod adresem internetowym [9]. W przypadku wyznaczenia momentu bezwładności łopat skorzystano ze znajomości położenia ich środka ciężkości. Wyznaczono go dzięki uprzejmości Pana Aleksandra Okroja właściciela firmy produkującej siłownie wiatrowe typu enwia [13]. Otóż środek ciężkości płata oddalony jest od jego podstawy o odcinek wynoszący 26% jego całkowitej długości. W przypadku modelowanej elektrowni odcinek ten wyniesie 0.68m. Przy wyznaczaniu momentów bezwładności posłużono się również twierdzeniem Steinera, które pozwala znaleźć moment bezwładności bryły dla równoległej osi obrotu. Parametry takie jak masa poszczególnych elementów elektrowni czy też długość odcinków, które zostały wykorzystane do obliczeń momentu bezwładności, zawarto na rys. 1 Natomiast tab. 1 przedstawia wykorzystane wzory oraz wynik przeprowadzonych obliczeń.
Rys. 1. Wartość momentu bezwładności poszczególnych elementów elektrowni względem osi Z.
Lp. |
Element |
Wzór |
Wynik |
1. |
Obudowa |
|
4.94 kg•m2 |
2. |
Podstawa |

|
7.35 kg•m2 |
3. |
Ster tylni |
|
1783.5 kg•m2 |
4. |
Ramie steru
tylnego |
|
145.48 kg•m2 |
5. |
Generator |

|
45.06 kg•m2 |
6. |
Łopaty |
|
71.48 kg•m2 |
7. |
Piasta |
|
4.86 kg•m2 |
8. |
Wał |

|
4.51 kg•m2 |
Suma |

|
2067.2 kg•m2 |
Tab. 1. Wartość momentu bezwładności poszczególnych elementów elektrowni względem osi Z.
Okazało się, że ster tylni wraz z utrzymującym go ramieniem ze względu na swoją odległość od osi obrotu ma największy wpływ na całkowity moment bezwładności elektrowni wiatrowej (93% całkowitego momentu bezwładności pochodzi właśnie od tych elementów).
Modelując ruch obrotowy elektrowni wiatrowej względem osi obrotu Z, należy wyznaczyć współczynnik tłumienia Dz. Współczynnik ten można interpretować jako te zjawiska fizyczne, które powodują tłumienie ruchu obrotowego elektrowni wiatrowej w osi Z. Do tych zjawisk należy m.in. opór powietrza, czy też powstawanie sił tarcia w łożysku. W związku z tym rachunkowe wyznaczenie tego współczynnika jest praktycznie niemożliwe. Jego wartość dobiera się empirycznie po obserwacji zachowania układu rzeczywistego. Na potrzeby modelu matematycznego wartość współczynnika tłumienia dobrano tak, aby przy ekstremalnej zmianie kierunku wiania wiatru prędkość obrotowa elektrowni wiatrowej względem osi Z, nie przekroczyła maksymalnej dopuszczalnej prędkości wynoszącej 0.35 rad/s. Tak dobrany współczynnik przyjmuje wartość 600N ms/rad.