Celem niniejszej pracy, jest sporządzenie takiego układu regulacji silnika asynchronicznego klatkowego, który nadałby mu cechy turbiny wiatrowej. Tzn. należy tak sterować pracą silnika indukcyjnego, aby przypominała ona dynamikę konwersji energii wiatru na energię mechaniczną koła wiatrowego. Istnieje wiele sposobów realizacji tego zagadnienia, bazujących na metodach sterowania wektorowego bądź nieliniowego z pomiarem czy też bez pomiaru prędkości obrotowej silnika. W pracy zdecydowano się wykorzystać zmodyfikowane sterowanie multiskalarne, które daje możliwość zadawania odpowiednio wyliczonego momentu mechanicznego na wał generatora (podobny schemat zadawania momentu wykorzystano w modelu matematycznym). Zastosowane sterowanie (
rys. 1) opiera się na multiskalarnym modelu silnika, które prowadzi do wyodrębnienia w nim dwóch niezależnych podukładów [
4]:
- układu mechanicznego, składającego się z regulatora PI, odpowiadającego za regulację zmiennej x12, której wartość jest wprost proporcjonalna do momentu elektromagnetycznego silnika indukcyjnego. Wielkość wyjściowa z regulatora jest wielkością sterującą m1 w odprzężonym podsystemie mechanicznym,
- układu elektromagnetycznego składającego się z dwóch połączonych kaskadowo regulatorów PI, które odpowiedzialne są za regulację zmiennej proporcjonalnej do kwadratu sumienia x21 oraz zmiennej x22 zwanej zmienną magnesującą. Wielkość wyjściowa z regulatora zmiennej x22 jest wielkością sterującą m2 w odprzężonym podsystemie elektromagnetycznym.
Dodatkowo w układzie regulacji należało wprowadzić odpowiednie ograniczenie na zmienną x12, związane ze zjawiskiem ślizgania się pasów przekładni podczas zadawania zbyt dużego momentu mechanicznego na układ przeniesienia napędu.
Rys. 1. Schemat układu sterowania multiskalarnego.
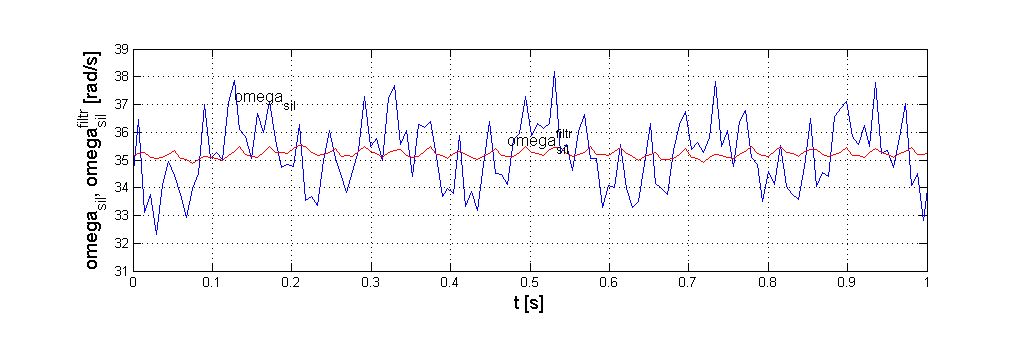
Przed przystąpieniem do realizacji układu sterowania należało przeprowadzić próbę zwarcia i próbę biegu jałowego oraz dokonać pomiaru rezystancji uzwojeń w celu identyfikacji parametrów napędu. Podczas analizy danych pomiarowych okazało się, że uzwojenie stojana wykazuje silną asymetrię (rezystancja w fazie U w stosunku do pozostałych faz różni się aż o 0.3Ω). Taka niesymetryczność uzwojenia maszyny powoduje, że w sygnale estymowanej prędkości obrotowej silnika występują silne zakłócenia (rys. 2). Zdecydowanie pogarsza to jakość sterowania, ponieważ sygnał z obserwatora prędkości wykorzystywany jest w układzie zadawania momentu, co powoduje, że zakłócenia te przenoszą się na wielkość sterującą m1. W związku z tym postanowiono użyć filtr kołowy, który uśrednia wartość z obserwatora prędkości, wykorzystując przy tym 400 próbek z pomierzonego sygnału. Na rys. 2 przedstawiono rezultat osiągnięty przez modyfikację układu sterowania. Jak widać, oscylacje sygnału z obserwatora prędkości są należycie tłumione.
Rys. 2. Sygnał z obserwatora prędkości, przed i po filtracji przeliczony z jednostek względnych na jednostki rzeczywiste wyrażone w rad/s (ωsil - wartość sygnału prędkości obrotowej silnika otrzymana bezpośrednio z obserwatora, ωsilfiltr- sygnał prędkości obrotowej silnika za filtrem uśredniającym)