Każda elektrownia wiatrowa z poziomą osią obrotu powinna mieć możliwość ustawienia płaszczyzny koła wiatrowego prostopadle względem kierunku wiatru. We współczesnych konstrukcjach układ ten realizowany jest w sposób aktywny bądź pasywny. W przypadku elektrowni wiatrowych nie przekraczających kilkudziesięciu kilowatów, stosuje się pasywny układ kierunkowania turbiny wiatrowej na wiatr. Natomiast w dużych instalacjach wymagane jest stosowanie aktywnej regulacji kierunku ustawienia.
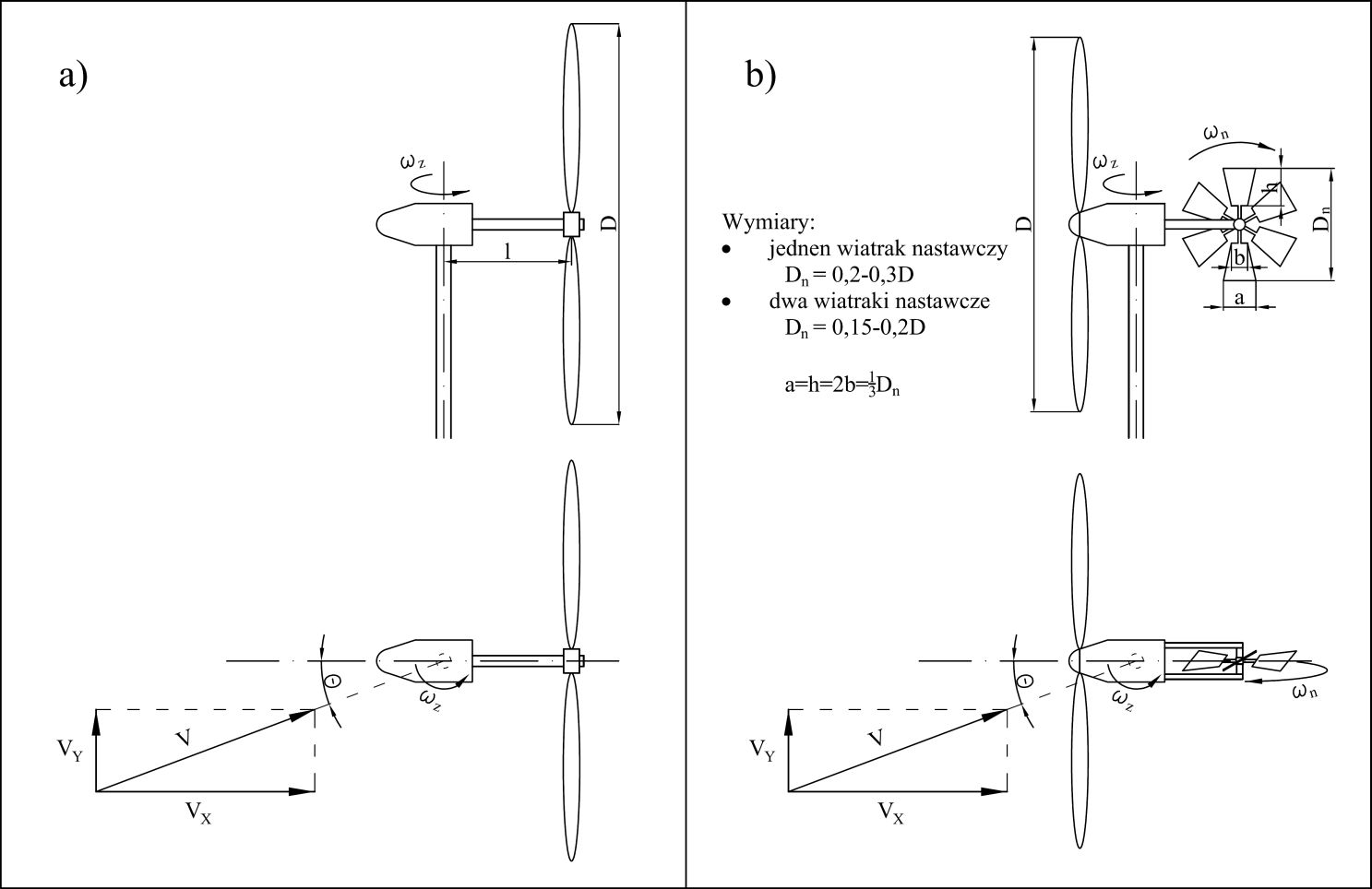
Pasywne kierunkowanie silnika wiatrowego na wiatr jest powszechnie stosowane w elektrowniach wiatrowych, których średnica nie przekracza 30m. Najprostszym sposobem realizacji pasywnego kierunkowania jest umieszczenie silnika wiatrowego za wieżą (rys 1a). W takim przypadku moment obrotowy, który powoduje ustawienie się turbiny wiatrowej pod wiatr jest wprost proporcjonalny do odległości l wirnika od pionowej osi obrotu. Pomimo swej prostoty mechanizm ten jest bardzo rzadko stosowany, ponieważ posiada szereg wad. Wynikają one głównie z faktu, że łopaty wirnika znajdują się za wieżą. Powoduje to częściowe i okresowe zasłanianie przez wieżę powierzchni zakreślanej przez wirnik, czego konsekwencją jest skłonność całej konstrukcji do drgań. Jednocześnie znaczne przesunięcie wirnika od gondoli powoduje powstanie dużych sił oporowych w łożyskach wału turbiny.
Inny sposób pasywnego kierunkowania turbiny wiatrowej pod wiatr polega na wykorzystaniu nastawczego wiatraka. Taki mechanizm składa się z jednego lub częściej z dwóch dodatkowych silników wiatrowych, które umieszczone są w pewnej odległości za wieżą i ustawione tak, aby ich płaszczyzna obrotu była prostopadła względem płaszczyzny głównego silnika wiatrowego. W takich układach najczęściej stosuje się wiatraki wielołopatkowe (od 4 do 8 łopat, ich wymiar oraz kształt przedstawia rys 1b). Natomiast wał tych silników nastawczych sprzężony jest za pomocą odpowiedniej przekładni z zębatym pierścieniem umieszczonym nieruchomo na szczycie wieży. Przełożenie takiej przekładni powinno być tak dobrane, aby prędkość kątowa gondoli ωz była mniejsza niż 0,31 rad/s. Należy tu zaznaczyć, że obrót wiatraków nastawczych wywołuje tylko taki wiatr, którego kierunek jest różny od kierunku prostopadłego do płaszczyzny głównej turbiny wiatrowej, dzięki czemu elektrownia posiada możliwość nadążania za zmianami kierunku wiatru.
Rys. 1. Sposoby kierunkowania silników wiatrowych na wiatr: a) ustawiając silnik wiatrowy za wieżą, b) za pomocą nastawczego wiatraka (V - prędkość wiatru, VX i VY - składowe prędkości wiatru, Θ - kąt odchylenia osi wirnika od kierunku wiatru, ωz - prędkość kątowa silnika wiatrowego względem osi pionowej Z, ωn - prędkość kątowa nastawczego wiatraka).
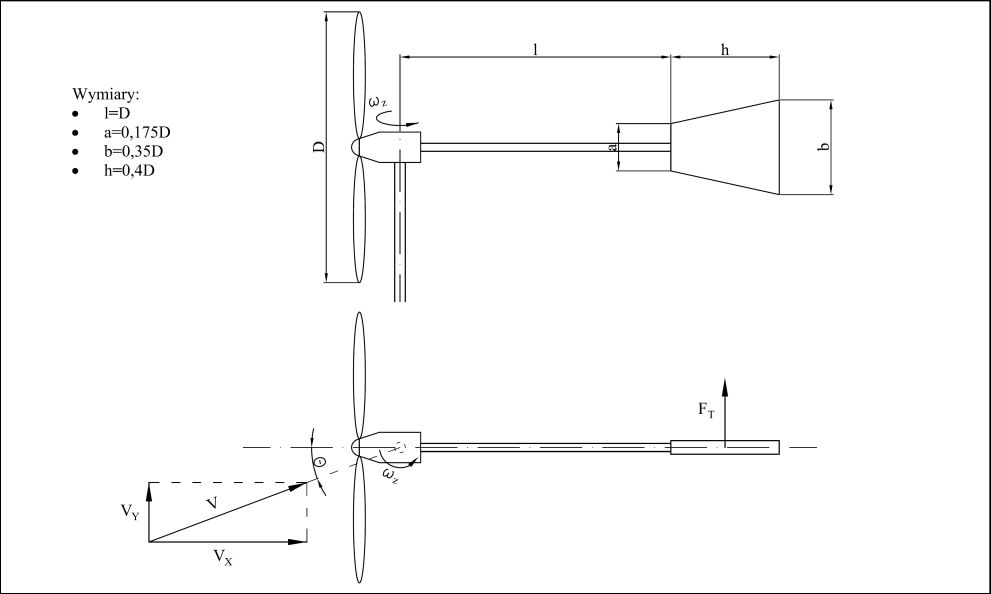
Jednak najczęściej stosowanymi układami do pasywnego kierunkowania elektrowni wiatrowej na wiatr są urządzenia z tylnym sterem (rys 2). Sposób działania takiego mechanizmu jest bardzo prosty. W momencie kiedy silnik wiatrowy nie zajmuje położenia prostopadłego do kierunku wiatru, to w takim przypadku na sterze tylnym występuje siła boczna. Powoduje ona odpowiedni obrót gondoli elektrowni wiatrowej w osi pionowej, aż do ponownego zajęcia przez silnik wiatrowy położenia prostopadłego do kierunku wiatru. Dla takich konstrukcji trzeba pamiętać o odpowiednim dobraniu długości ramienia oraz rozmiaru i kształtu steru kierunkowego. Zwykle przyjmuje się, że długość ramienia powinna być w przybliżeniu równa średnicy turbiny wiatrowej. Natomiast co do kształtu steru, jedna z metod podaje, aby za ster przyjąć obrys trapezu równobocznego o poziomej osi symetrii (jego wymiary podano na (rys 2). Można również zastosować ster prostokątny, którego długość jest równa promieniowi silnika wiatrowego, a szerokość jest dwa razy mniejsza od długości. Takie rozmiary steru kierunkowego nie powinny dopuszczać do większych niż 10o odchyleń osi wirnika od kierunku wiatru.
Rys. 2. Kierunkowanie silnika wiatrowego na wiatr z wykorzystaniem steru tylnego (V - prędkość wiatru, VX i VY - składowe prędkości wiatru, Θ - kąt odchylenia osi wirnika od kierunku wiatru, ωz - prędkość kątowa silnika wiatrowego względem osi pionowej Z, FT - siła boczna wywierana przez wiatr na ster tylni).
Opisane powyżej mechanizmy kierunkowania turbiny wiatrowej na wiatr z pojedynczym sterem posiadają jedną wadę, przy małym odchyleniu kierunku wiatru od kierunku prostopadłego względem silnika wiatrowego na ster działa niewielka siła boczna FT. Aby zwiększyć tą siłę czasem stosuje się stery dwupłatowe. Dla takich konstrukcji przy wietrze o małym wychyleniu od kierunku osi silnika, działanie obu płatów dodaje się. Natomiast przy dużych wychyleniach jeden z płatów „zasłania” drugi dzięki czemu siła boczna FT nie jest tak duża niż przypadku pojedynczego steru, przez co uzyskuje się mniejszą prędkość kątową gondoli . To zjawisko jest istotną zaletą podwójnych sterów kierunkowych, ponieważ mniejsza prędkość kątowa względem osi pionowej wywołuje mniejszy moment giroskopowy próbujący zgiąć łopatę wirnika u jej nasady. Dzięki temu cała konstrukcja staje się wytrzymalsza.
Główną zaletą nastawiania silników wiatrowych pod wiatr za pomocą steru kierunkowego jest możliwość wykorzystania tego mechanizmu (przy małych modyfikacjach) do regulacji prędkości obrotowej oraz mocy turbiny wiatrowej. Regulacja ta polega na tym, że podczas zbyt silnego wiatru, turbinie wiatrowej nadaje się położenie skośne względem kierunku wiatru (rys 3). Prędkość obrotowa turbiny wiatrowej w takim położeniu jest uzyskiwana tylko przez składową prędkości wiatru VX, prostopadłą do płaszczyzny silnika wiatrowego. Wartość tej prędkości można obliczyć ze wzoru (1):
Z powyższego równania wynika, że aby uzyskać stałą moc przy zmieniającej się prędkości wiatru, należy dobierać tak kąt odchylenia Θ, aby składowa prostopadła prędkości wiatru VXŹ była zawsze stała.
We współczesnych elektrowniach wiatrowych wyróżnia się dwa typy układów regulacji prędkości obrotowej wirnika poprzez zmianę położenia silnika wiatrowego względem kierunku wiatru. Pierwszy z nich składa się z dodatkowego steru bocznego, który umieszczony jest tuż za silnikiem wiatrowym i połączony sztywno z gondolą (rys 3a). Jego powierzchnia zwykle jest około cztery razy mniejsza niż powierzchnia steru tylnego. Podczas silniejszych podmuchów wiatru, siła parcia na ster boczny powoduje przezwyciężenie naciągu sprężyny, w wyniku czego silnik wiatrowy ustawia się skośnie względem kierunku wiatru. W przypadku zastosowania takiego układu regulacji należy pamiętać o odpowiednim doborze naciągu sprężyny regulacyjnej. Największą zaletą tego rozwiązania jest jego prosta budowa, która w przeciwieństwie do innych rozwiązań nie wymaga żadnych dodatkowych układów elektronicznych sterujących jego pracą.
Drugi sposób regulacji prędkości kątowej wirnika poprzez odchylanie silnika wiatrowego od położenia prostopadłego do kierunku wiatru polega na zastosowaniu elektronicznie sterowanego siłownika (rys 3b). Na podstawie zmierzonej prędkości obrotowej wirnika i (lub) prędkości wiatru elektroniczny układ powoduje zmianę długości siłownika, która prowadzi do odchylenia się turbiny wiatrowej względem kierunku wiatru. Oba opisane powyżej układy regulacji zabezpieczają elektrownię wiatrową przed zbyt silnymi wiatrami. W momencie kiedy wiatr przekracza pewną maksymalną wartość (zwykle koło 18m/s) turbina wiatrowa ustawia się w położeniu równoległym do prędkości wiatru. Przy takim maksymalnym odchyleniu silnika wiatrowego załączany jest automatycznie hamulec unieruchamiający wirnik.
Rys. 3. Schemat regulacji prędkości kątowej wirnika turbiny wiatrowej z wykorzystaniem: a) steru bocznego, b) siłownika (V - prędkość wiatru, VX i VY - składowe prędkości wiatru, Θ - kąt odchylenia osi wirnika od kierunku wiatru).
Rozwiązania opisane powyżej stosowane są tylko w niewielkich urządzeniach pracujących dla małych odbiorców. Natomiast w przypadku elektrowni wiatrowych, których moc znamionowa przekracza kilkadziesiąt kilowatów konieczne jest zastosowanie aktywnego mechanizmu regulacji położenia gondoli. Składa się on z zębatego pierścienia znajdującego się szczycie wieży. Pierścień ten połączony jest z kołem zębatym osadzonym na wale hydraulicznego bądź elektrycznego serwonapędu (rys 3b). Uruchomienie silnika serwonapędu powoduje obrót gondoli. Zazwyczaj są to te same serwonapędy, które wykorzystuje się w mechanizmach regulacji kąta natarcia łopat (pitch controlled), przez co charakteryzują się dużym momentem obrotowym oraz stosunkowo małymi rozmiarami. W skład takiego mechanizmu kierunkowania elektrowni na wiatr wchodzą również hamulce. Hamulce pozwalają na utrzymanie gondoli w jednej pozycji podczas wykonywania czynności serwisowych. Pracą takiego układu kierunkowania elektrowni na wiatr steruje układ mikroprocesorowy. Sprawdza on odczyt z wiatrowskazu i w razie potrzeby koryguje ustawienie turbiny wiatrowej. Do zadań kontrolera należy również zapobieganie skręceniu kabli, które może nastąpić w przypadku, kiedy dojdzie do kilkakrotnego obrotu gondoli w tym samym kierunku. Dla dużych elektrowni wiatrowych, takie rozwiązanie problemu nadążania turbiny wiatrowej za kierunkiem wiatru jest tańsze, niż w przypadku wykorzystania do tego celu steru kierunkowego.