Na potrzeby modelu matematycznego przyjęto, że ster tylni elektrowni wiatrowej jest sterem prostokątnym o długości
lster, a szerokości dwa razy mniejszej od długości. Wymiar ramienia
lt1, na którym zamontowano ster równa się średnicy koła wiatrowego
D. Założenia te pozwalają na oszacowanie siły wywieranej przez wiatr na ten element układu. Powierzchnia tak zdefiniowanego steru wynosi
(1):
 |
(1) |
Aerodynamiczna siła wywierana przez wiatr na ster tylni równa się (2):
 |
(2) |
gdzie: |
cx - aerodynamiczny współczynnik oporu profilowego,
cz - aerodynamiczny współczynnik siły nośnej. |
Wartość współczynników aerodynamicznych cx i cz w znacznym stopniu zależy od kształtu steru oraz kąta natarcia strumienia wiatru Θ. Zazwyczaj wyznaczane są one doświadczalnie podczas odmuchiwania profilu dla różnych kątów natarcia.
Wcześniej zdefiniowany ster tylni można przyrównać do płata o profilu płaskiej płyty z wydłużeniem wynoszącym λw=0.5 (stosunek szerokości steru do długości). W publikacji [1] podano że dla takiego profilu o nieskończenie dużym wydłużeniu współczynniki aerodynamiczne w funkcji kąta natarcia można aproksymować funkcjami (3), (4):
 |
(3) |
 |
(4) |
Tak zdefiniowany aerodynamiczny współczynnik oporu profilowego cx' (3) nie uwzględnia zjawisk zachodzących na końcach profilu. Powstające tam zawirowania spowodowane wyrównywaniem się ciśnień na górnej i dolnej powierzchni płata powodują powstawanie tzw. oporów indukowanych. Z teorii oporu indukcyjnego wynika że współczynnik oporu indukcyjnego wynosi (5):
 |
(5) |
Zatem całkowity aerodynamiczny współczynnik oporu czołowego profilu cx dla steru tylnego składa się z sumy dwóch współczynników i wynosi (6):
 |
(6) |
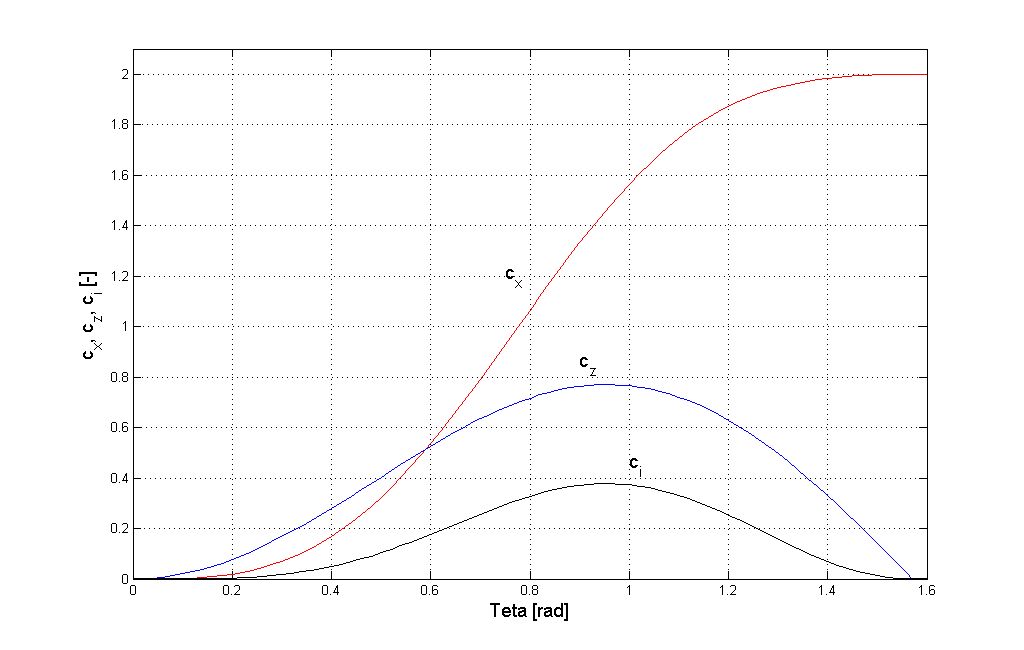
Na rys 1 przedstawiono wartość aerodynamicznych współczynników oporu indukcyjnego ci, oporu profilowego cx oraz siły nośnej cz w funkcji kąta odchylenia osi wirnika od kierunku wiania wiatru Θ. Należy zaznaczyć, że wartość tych współczynników jest identyczna dla ujemnych jak i dodatnich kątów Θ (funkcja parzysta). Własność tą wykorzystano w modelu matematycznym, gdzie zamiast tworzyć dwie odrębne funkcje do liczenia wartości współczynników aerodynamicznych dla kątów dodatnich bądź ujemnych, stworzono jedną funkcję, której argumentem jest wartość bezwzględna kąta Θ.
Rys. 1. Wartość aerodynamicznych współczynników oporu indukcyjnego ci, oporu profilowego cx oraz siły nośnej cz w funkcji kąta odchylenia osi wirnika od kierunku wiatru Θdla profilu płaskiej płyty o wydłużeniu λw=0.5.
Siła wywierana przez wiatr na ster tylni, jak wynika ze wzoru (2), jest wprost proporcjonalna do prędkości wiatru za kołem wiatrowym V0. Prędkość tą można oszacować, przekształcając równanie współczynnika wykorzystania energii wiatru patrz tutaj z postaci Cp = ƒ(V, V0) na postać V0 = ƒ(Cp, V) . Rozwiązując otrzymaną tym sposobem funkcję, okazuje się, że posiada ona trzy rozwiązania V01(7), V02 (8) oraz V03(9):
 |
(7) |
 |
(8) |
 |
(9) |
Analizując otrzymane rozwiązania przyjęto, że dziedzinę funkcji V0 = ƒ(Cp, V) w przypadku argumentu Cp stanowi zbiór liczb z zakresu 〈0, 0.5〉, natomiast dla argumentu V zbiór liczb 〈0, 22〉. Funkcja dla tak zdefiniowanej dziedziny w przypadku rozwiązania V01 (7) oraz V03 (9) przyjmuje tylko wartości ujemne (rys 2), przez co nie ma fizycznego sensu. Natomiast rozwiązanie V02 (8) przyjmuje tylko wartości dodatnie (rys 2), dlatego też wzór na prędkość wiatru za kołem wiatrowym przyjmuje postać (8).
Rys. 2. Wykres zbioru wartości funkcji a) V01 (7); b) V02 (8); c) V03 (9) dla argumentów Cp ∈ 〈0,0.5〉 oraz V ∈ 〈0,22〉.
Po zdefiniowaniu siły bocznej FT działającej na ster tylni (2) można określić, ile wynosi moment obrotowy pochodzący od tego elementu elektrowni wiatrowej. Przy długości ramienia siły wynoszącej lt wartość tego momentu równa się (10):
 |
(10) |
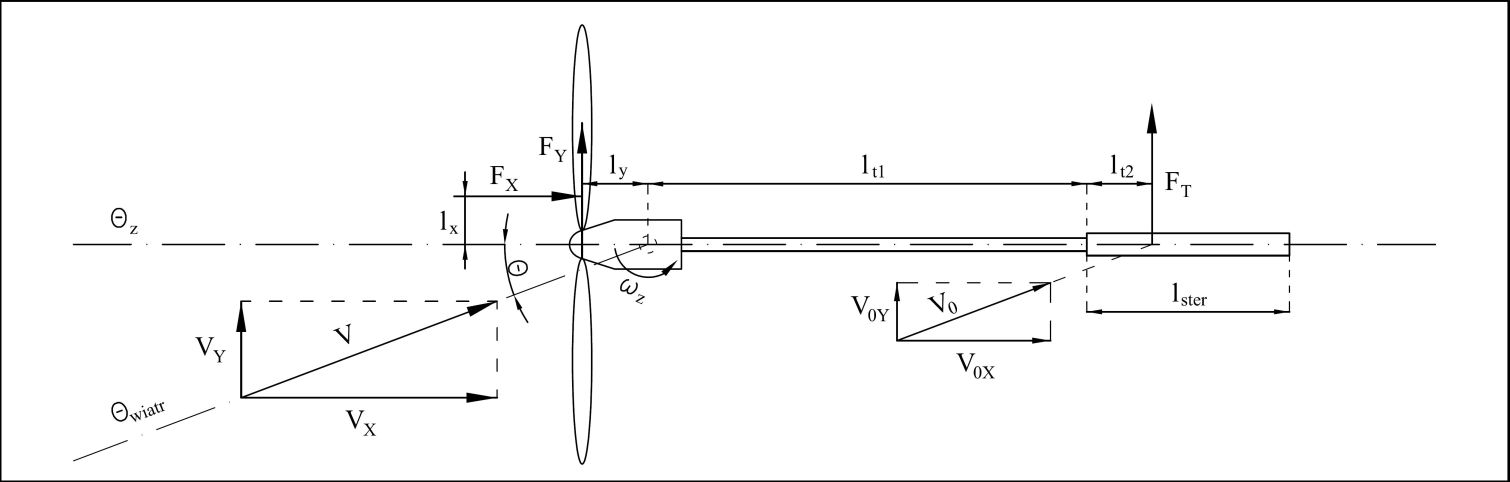
Jak wynika z rys 3 długość ramienia siły lt odmierzana jest od osi obrotu gondoli do punktu środka parcia wiatru na ster tylni. W skład tak zdefiniowanego odcinka wchodzą dwie składowe. Pierwsza z nich to długość ramienia, na którym zamontowany jest ster tylni lt1 (w modelu przyjęto, że jest ona równa średnicy koła wiatrowego D). Druga związana jest ze środkiem parcia wiatru na ster tylni i wynosi Vt2. Zatem całkowita długość ramienia siły wyniesie (11):
 |
(11) |
Punkt przyłożenia wypadkowej siły aerodynamicznej działającej na ster tylni (środek parcia) zmienia swe położenie w zależności od kąta natarcia wiatru Θ. Natomiast długość odcinka lt zmienia się wraz ze zmianą środka parcia wiatru i wynosi (12):
 |
(12) |
gdzie: |
xpT - współczynnik położenia środka parcia,
lster - długość steru tylnego. |
Rys. 3. Siły aerodynamiczne, występujące na kole wiatrowym odchylonym od kierunku wiatru (Θ - kąt odchylenia osi wirnika od kierunku wiatru, Θz - położenie osi wirnika, Θwiatr- kierunek wiania wiatru, FT - siła boczna wywierana przez wiatr na ster tylni, FX, FY - składowe siły parcia wiatru na koło wiatrowe, V - prędkość wiatru, VX i VY - składowe prędkości wiatru, V0 - prędkość wiatru za kołem wiatrowym,V0X i V0X - składowe prędkości wiatru za kołem wiatrowym z - prędkość kątowa elektrowni względem osi pionowej Z, lt1 i lt2 - ramie siły FT, lster - długość płata steru tylnego, lx - ramie siły FX , ly - ramie siły FY).
W publikacji [1] przedstawiono wykres położenia środka parcia dla płyt płaskich o różnych wydłużeniach λw (również dla profilu o wydłużeniu λw = 0.5). Na potrzeby modelu matematycznego wybrano kilka charakterystycznych punktów z tej charakterystyki. Tak otrzymany zbiór punktów wykorzystano następnie do aproksymacji. Program Matlab posiada wiele funkcji pozwalających na aproksymację punktową, jedną z nich jest funkcja polifit(). Podczas aproksymacji całej charakterystyki jednym wielomianem za pomocą tej komendy okazało się, że niemożliwe jest otrzymanie zadowalającego rozwiązania - błąd aproksymacji w skrajnych przypadkach osiągał nawet wartość 10% wartości rzeczywistej. Związku z tym podzielono zbiór punktów na dwa podzbiory i dokonano oddzielnej aproksymacji charakterystyki dla argumentów z przedziału 〈0,0.28〉 oraz dla argumentów z przedziału 〈0.28,1.06〉. Cały skrypt dokonujący aproksymacji charakterystyki położenia środka parcia umieszczono w zakładce Initialization w masce podsystemu ”MODEL STERU TYLNEGO ZE STEROWANIEM”.
Na rys 4przedstawiono wynik przeprowadzonej aproksymacji. Jak widać, praktycznie wszystkie punkty wykorzystane do tego celu przechodzą przez funkcję aproksymującą (wartość błędu aproksymacji mieści się w granicy +/-0.5% wartości rzeczywistej).
Rys. 4. Wynik aproksymacji charakterystyki położenia środka parcia xpT (dla płyty płaskiej o wydłużeniu λw=0.5) w funkcji kąta natarcia wiatru Θ z zaznaczeniem punktów użytych do aproksymacji.